このドキュメントは http://edu.net.c.dendai.ac.jp/ 上で公開されています。
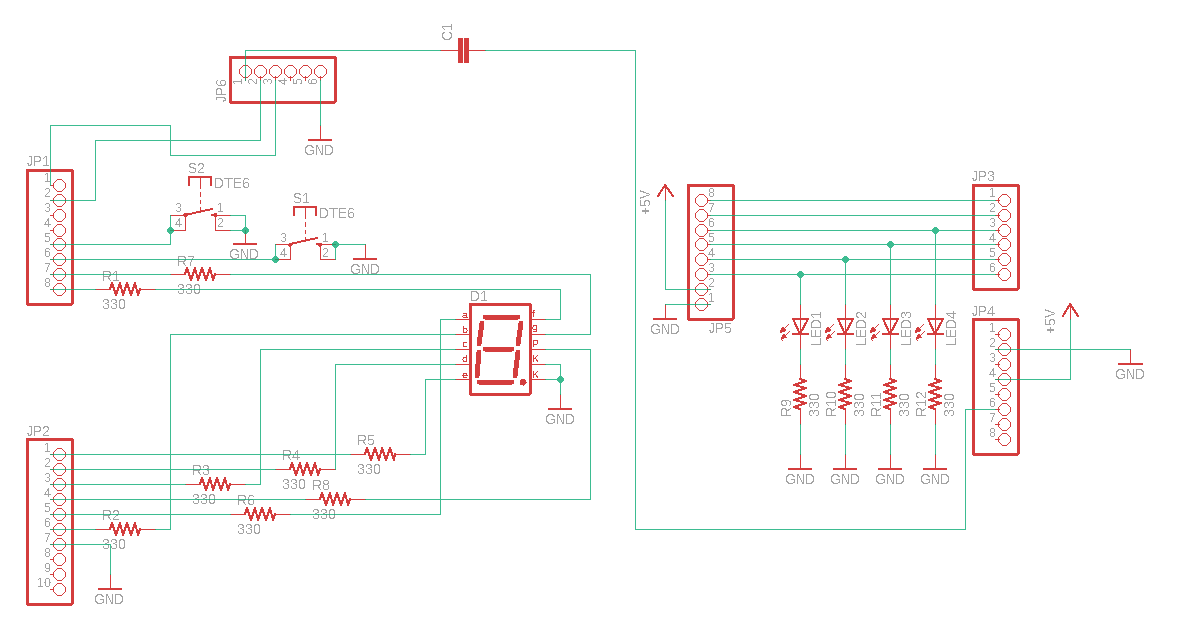
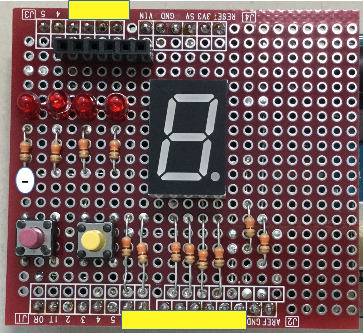
今後のプログラミング演習のために、7seg LED と押しボタンのあるトレー ニングキットを作成します。 部品、回路図を提供しますので、各自作成してきてください。
| 機材 | 数量 |
|---|---|
| arduinoシールド用基板 | 1 |
| 1x40ピンヘッド | 1 |
| 1x8ピンソケット | 1 |
| 1x6ピンソケット | 1 |
| タクトスイッチ | 3 |
| 錫メッキ線 | 30cm |
| ラッピングワイヤ | 10cm |
| 5W0.1Ωセメント | 1 |
| 100Ω | 2 |
| 120Ω | 3 |
| 220Ω | 1 |
| 330Ω | 25 |
| 1kΩ | 6 |
| 22kΩ | 2 |
| 5kΩ半固定 | 3 |
| 0.1μF | 1 |
| 電池スナップ | 1 |
| 単3電池2本用ボックス | 2 |
| 3mmLED(赤or黃or緑) | 4 |
| LED(3or5mm,赤or黃or緑) | 7 |
| カソードコモン7segLED | 1 |
| 3色LED | 1 |
| 3色LED用キャップ | 1 |
| FA-130RAモータ | 1 |
| 1N4007 | 4 |
| 2sc1815 | 2 |
| 2sk4017 | 2 |
| 2sb1018A | 2 |
| SN754410 | 1 |
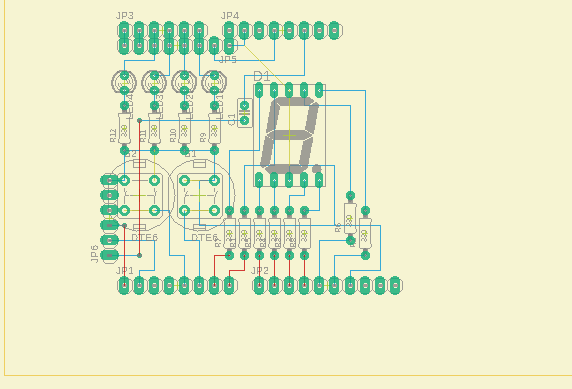
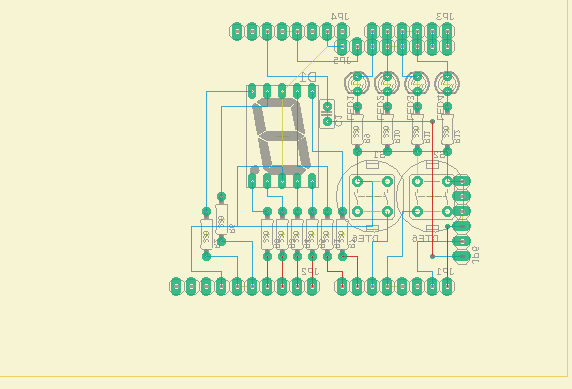
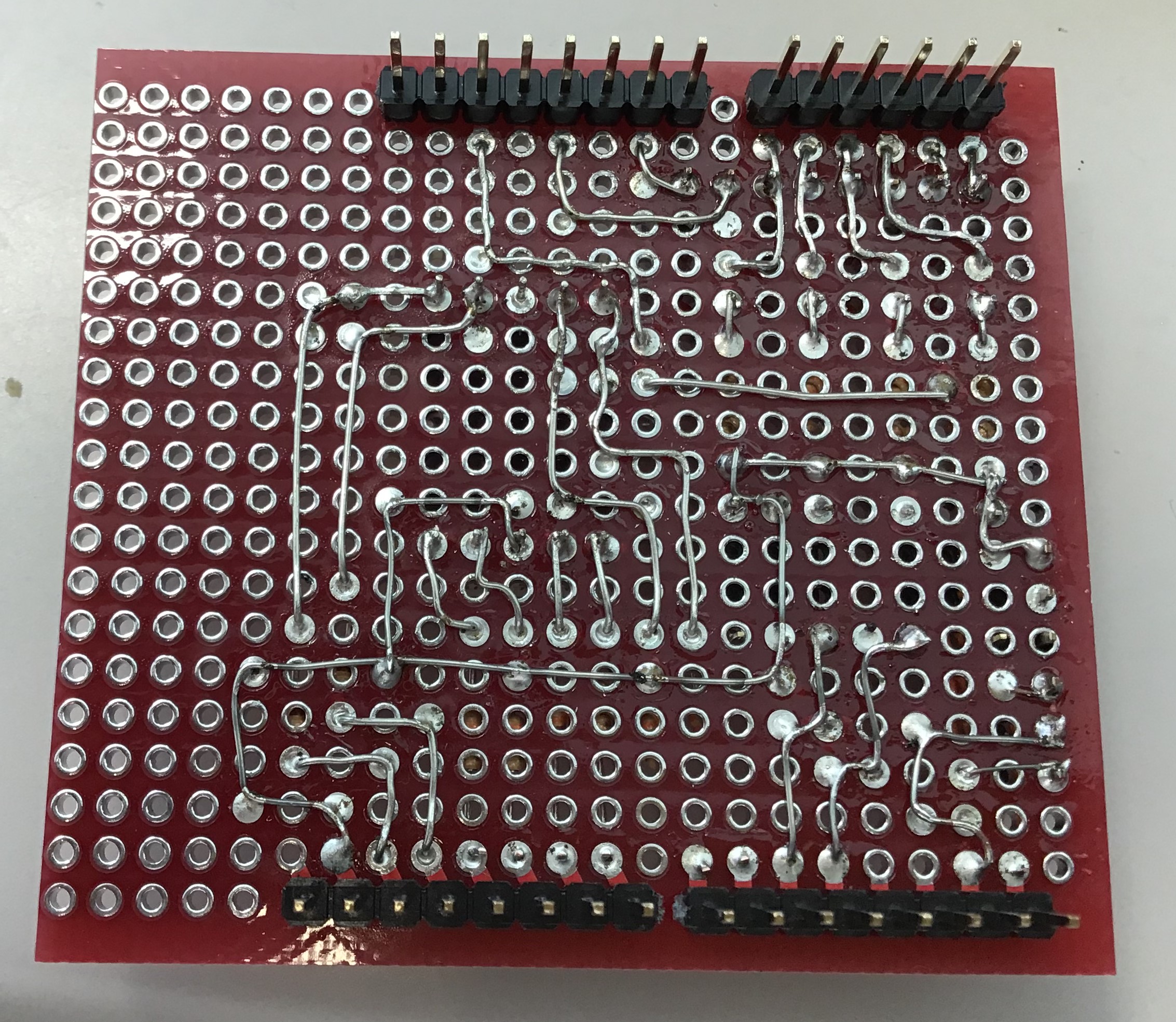
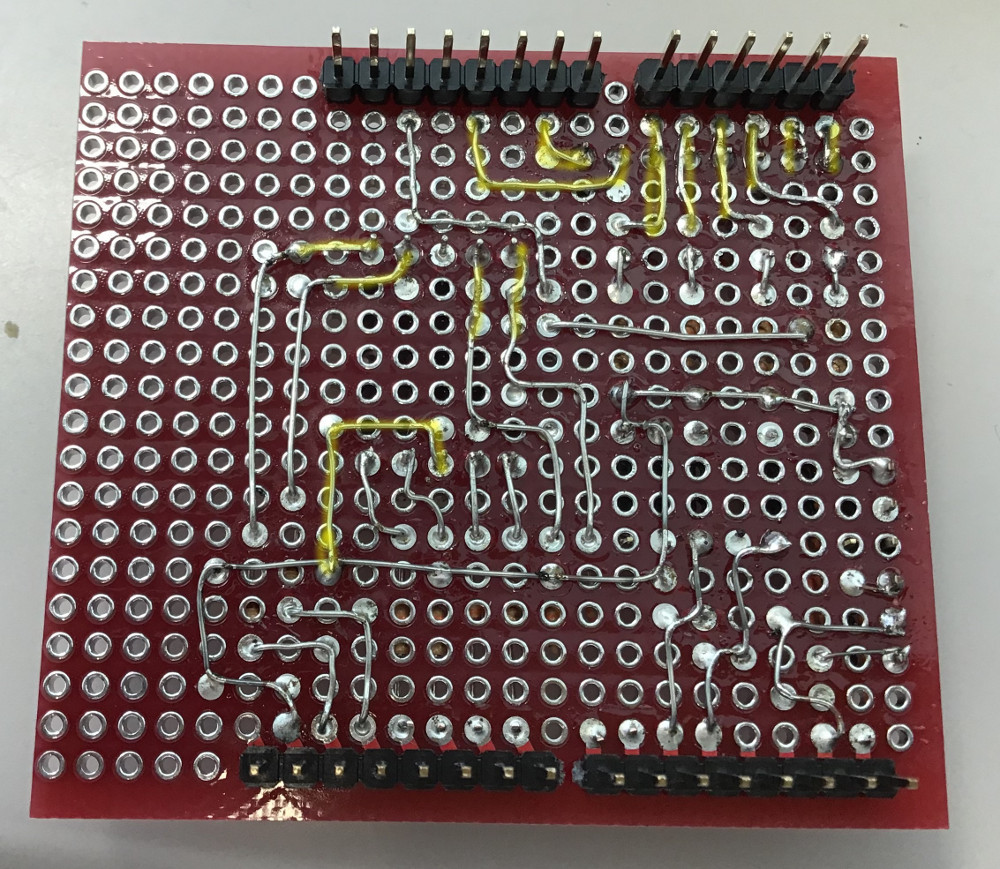
青い線は基板裏面の配線。赤い線は基板表面の配線。黄色い線は無視すること。
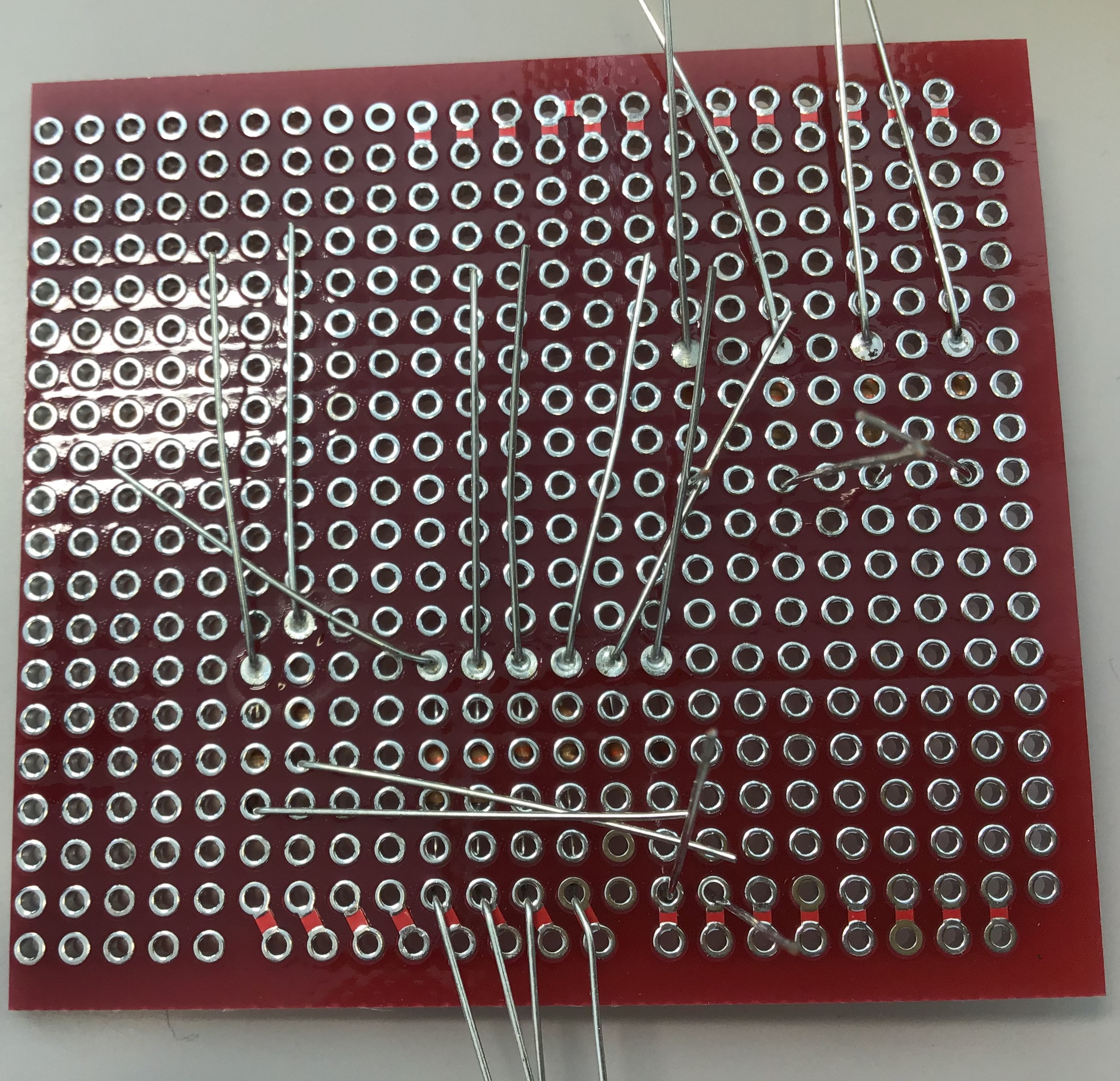
抵抗のリードは曲げて配線に使う。
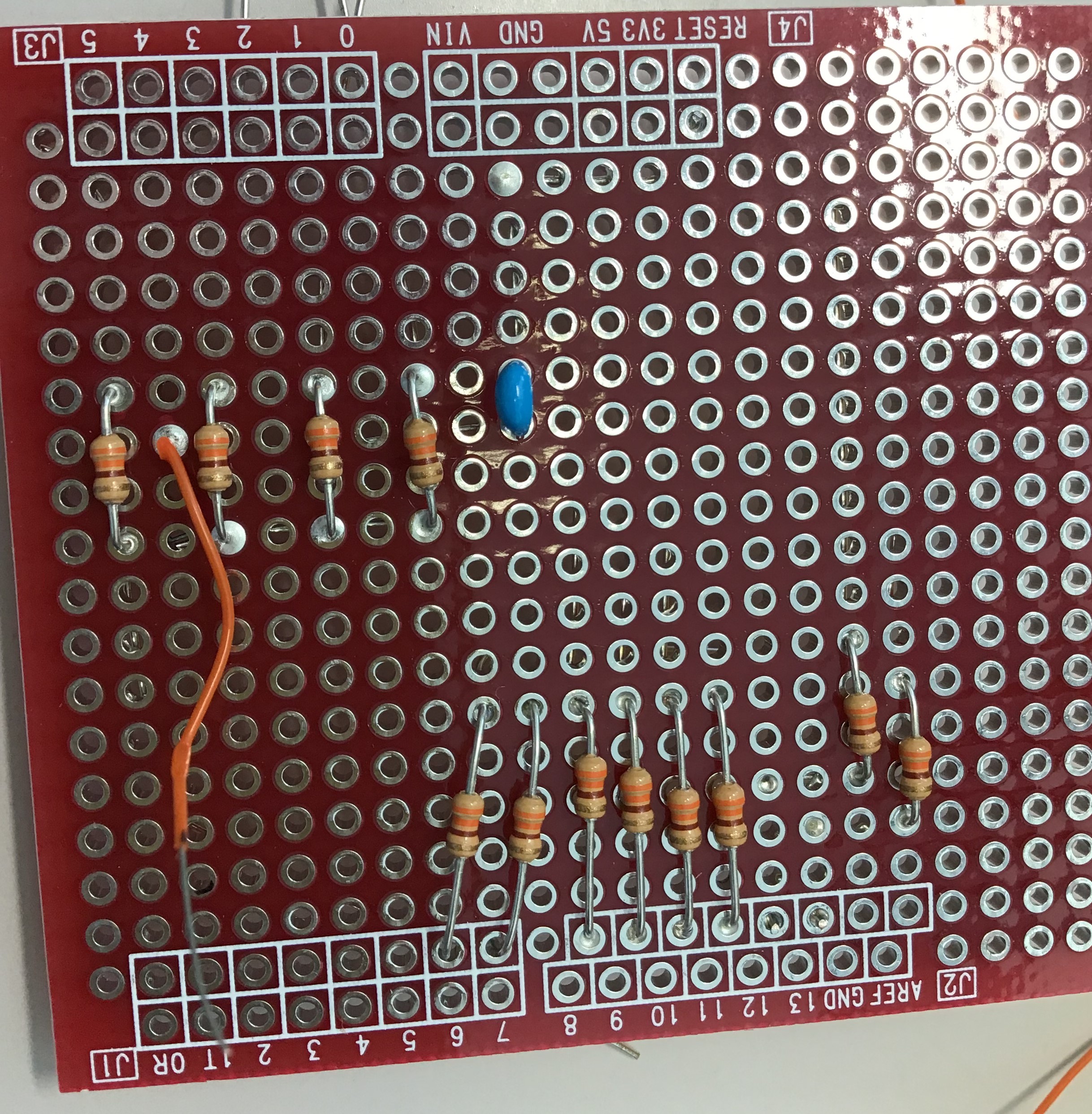
抵抗とジャンパを取り付ける。ジャンパは片方をはんだ付けして、反対側 の必要な長さにペンで印を付け、被覆を落としてはんだ付けする。
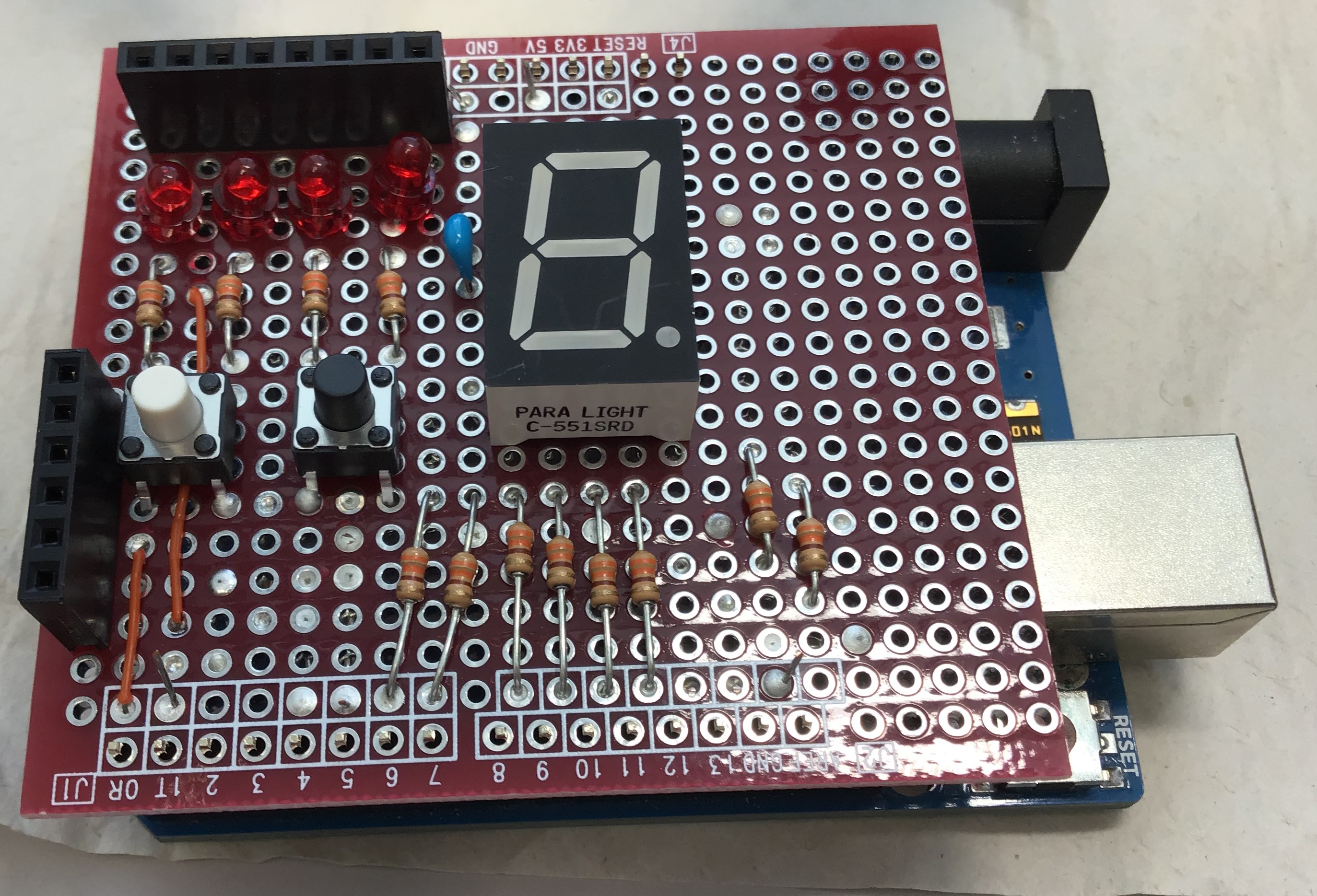
Arduino との接続は、Arduino にピンを差してはんだ付けするとぴったり 揃う。
const byte out[] = {6,7,8,9,10,11,12,13,A0,A1,A2,A3,0xff};
const byte button1 = 4;
const byte button2 = 5;
void setup() {
for(byte i = 0; out[i] != 0xff; i++){
pinMode(out[i], OUTPUT);
}
pinMode(button1, INPUT_PULLUP);
pinMode(button2, INPUT_PULLUP);
}
void writeArray(bool signal){
for(byte i = 0; out[i] != 0xff; i++){
digitalWrite(out[i], signal);
}
}
void loop() {
static bool prev = HIGH;
static bool now = HIGH;
static bool condition = HIGH;
now = digitalRead(button2);
if(now == HIGH && prev == LOW){
condition ^= true;
}
prev = now;
writeArray(condition == digitalRead(button1));
}
;
; switchtraining.asm
;
; Created: 2018/09/17 4:39:20
; Author : sakamoto
;
.cseg
.org 0x0000
rjmp reset
.org INT_VECTORS_SIZE
reset:
ldi r16,high(RAMEND)
out SPH,r16
ldi r16,low(RAMEND)
out SPL,r16
.equ onb = 0b00111111
.equ ond = 0b11000000
.equ pullup = 0b00110000
.equ onc = 0b00001111
ldi r16,onb
out ddrb, r16
ldi r16,ond
out ddrd, r16
ldi r16,pullup
out portd, r16
ldi r16,onc
out ddrc, r16
.def now = r17
.def prev = r18
.def cond = r19
clr prev
ser cond
.macro clrport
in r16,@0
andi r16,~@1
out @0,r16
.endmacro
.macro setport
in r16,@0
ori r16,@1
out @0,r16
.endmacro
main:
in now,pind
sbrc prev,pind5
rjmp pressed
sbrs now,pind5
rjmp notpressed
nowpressed:
ldi r16,1<<pind4
eor cond,r16
notpressed:
pressed:
andi prev,~(1<<pind5)
or prev,now
eor now, cond
sbrc now,pind4
rjmp swon
swoff:
clrport portb,onb
clrport portd,ond
clrport portc,onc
rjmp main
swon:
setport portb,onb
setport portd,ond
setport portc,onc
rjmp main
.exit
volatile 宣言を使う
スケッチ例の Blink を改造して、自分の1秒待つ関数 mydelay を作ろう。
以下のプログラムで1秒点灯するように ??? の部分に数字を入れよう。
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
void mydelay(){
for(volatile long i=0; i< ???; i++){
}
}
void loop(){
digitalWrite(LED_BUILTIN, HIGH);
mydelay();
delay(10);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
volatile 宣言を使う
演習3-1の volatile 宣言を外すと動きがどう変化するか確かめよう。
static 宣言を使う
以下のプログラムの長短を考えよう。
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
bool flag = true;
void loop(){
digitalWrite(LED_BUILTIN, flag);
flag = !flag;
delay(1000);
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
void loop(){
static bool flag = true;
digitalWrite(LED_BUILTIN, flag);
flag = !flag;
delay(1000);
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
void loop(){
bool flag = true;
digitalWrite(LED_BUILTIN, flag);
flag = !flag;
delay(1000);
}
クラス宣言を使う
以下のプログラムの動作を考えよう。
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
bool flag = true;
public:
void invert(){
flag = !flag;
digitalWrite(LED_BUILTIN, flag);
}
};
Led led;
void loop(){
led.invert();
delay(1000);
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
bool flag = true;
public:
void invert(){
flag = !flag;
digitalWrite(LED_BUILTIN, flag);
}
};
void loop(){
static Led led;
led.invert();
delay(1000);
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
bool flag = true;
public:
void invert(){
flag = !flag;
digitalWrite(LED_BUILTIN, flag);
}
};
void loop(){
Led led;
led.invert();
delay(1000);
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
bool flag = true;
public:
void invert(){
flag = !flag;
digitalWrite(LED_BUILTIN, flag);
}
};
void loop(){
static Led* p = new Led();
p->invert();
delay(1000);
}
クラスを使って機能を抽象化
以下のプログラムの動作を考えよう。
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
int times;
void blinkLed(){
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
delay(100);
}
public:
Led(int t):times(t){}
void flash(){
for(int i=0; i<times; ++i){
blinkLed();
}
delay(1000);
}
};
void loop(){
static Led led(3);
led.flash();
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
int times;
void blinkLed(){
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
delay(100);
}
public:
Led(int t):times(t){}
void flash(){
for(int i=0; i<times; ++i){
blinkLed();
}
delay(1000);
}
};
void loop(){
static Led* leds[]={new Led(1), new Led(2), new Led(3), NULL};
for(Led** p = leds; *p != NULL; ++p){
(*p)->flash();
}
}
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
int times;
void blinkLed();
public:
Led(int t);
void flash();
};
Led::Led(int t):times(t){}
void Led::blinkLed(){
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
delay(100);
}
void Led::flash(){
for(int i=0; i<times; ++i){
blinkLed();
}
delay(1000);
}
void loop(){
static Led* leds[]={new Led(1), new Led(2), new Led(3), NULL};
for(Led** p = leds; *p != NULL; ++p){
(*p)->flash();
}
}
右のメニューから複数タブを作って、プログラムを分割する。
#include "Led.h"
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
void loop(){
static Led* leds[]={new Led(1), new Led(2), new Led(3), NULL};
for(Led** p = leds; *p != NULL; ++p){
(*p)->flash();
}
}
class Led {
int times;
void blinkLed();
public:
Led(int t);
void flash();
};
#include "Arduino.h"
#include "Led.h"
Led::Led(int t):times(t){}
void Led::blinkLed(){
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
delay(100);
}
void Led::flash(){
for(int i=0; i<times; ++i){
blinkLed();
}
delay(1000);
}
演習3-1を利用して、1秒間の間だけ高速で点滅させて半分の明るさにする halfBlink メソッドを作りなさい。
だんだん明るくなってだんだん暗くなるような softBlink メソッドを作りなさい。
やり過ぎ感のある、継承によるオブジェクトの作り分け
void setup(){
pinMode(LED_BUILTIN,OUTPUT);
}
class Led {
void blinkLed(){
digitalWrite(LED_BUILTIN, HIGH);
delay(100);
digitalWrite(LED_BUILTIN, LOW);
delay(100);
}
protected:
virtual int times()=0;
public:
virtual ~Led(){}
void flash(){
for(int i=0; i<times(); ++i){
blinkLed();
}
delay(1000);
}
};
class Led2 : public Led {
protected:
virtual int times(){
return 2;
}
};
class Led3 : public Led {
protected:
virtual int times(){
return 3;
}
};
void loop(){
static Led* leds[]={new Led2(), new Led3(), NULL};
for(Led** p = leds; *p != NULL; ++p){
(*p)->flash();
}
}